Sprawozdanie - laboratorium 3
Wstęp
Naszym zadaniem na trzecich zajęciach była implementacja czterech algorytmów: Magazynier, Magazynier 2, Złodziej oraz Złodziej 2. Pracowaliśmy z robotem Henio, który czekał na nas złożony. Dodatkowo używaliśmy piłeczki wraz z podstawką.
Programy
Magazynier
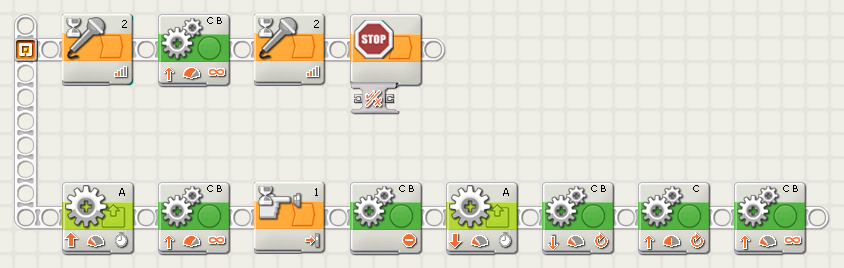
Działanie algorytmu jest następujące: Henio jedzie na wprost, aż do aktywowania czujnika dotyku. Wtedy łapie piłeczkę, cofa się nieznacznie i zawraca o 180 stopni. Następnie jedzie na wprost aż do napotkania przeszkody - wtedy upuszcza wiezioną piłeczkę. W algorytmie występuje wyłącznik awaryjny - na skutek aktywowania czujnika dźwięku robot przerywa działanie.

Działanie algorytmu można zobaczyć tutaj: http://www.youtube.com/watch?v=TKG5oLB8lKg
Magazynier 2
Ta wersja różni się jedynie warunkiem upuszczenia piłeczki. Używamy tutaj czujnika światła, który jest aktywowany gdy robot wjeżdża na białą kartkę papieru. Wtedy robot rozwiera szczęki.

Film obrazujący działanie: http://www.youtube.com/watch?v=tdf4EE9R89w
Złodziej
W algorytmie tym Henio jedzie na wprost, aż do napotkania piłeczki. Wtedy chwyta ją, cofa się lekko, obraca o 180 stopni i jedzie na wprost aż do aktywowania czujnika dźwięku. Zastosowany jest wyłącznik awaryjny taki sam jak w poprzednich programach.

Złodziej 2
Modyfikacja pierwotnego algorytmu polega na tym, że po aktywowaniu czujnika dźwięku (w dowolnym momencie działania programu) robot zamiast zatrzymywać się przyspiesza. Dopiero ponowne aktywowanie tego czujnika powoduje zatrzymanie robota.
Robot w akcji: http://www.youtube.com/watch?v=Rip3Wzi3xSQ
Podsumowanie
Na laboratorium udało nam się napisać wszystkie cztery programy, które działały zgodnie z założeniami. Ponownie największy problem stanowiło dostarczone przez LEGO środowisko programowania NXT. Poza ograniczeniami narzucanymi na programy ujawniły się także niedogodności w ich budowaniu, takie jak np. brak opcji oddalania widoku.
Henio miał problem z łapaniem piłeczki stojącej na podstawce, dlatego jedno z nas trzymało ją w ręce.
Według nas laboratorium byłoby ciekawsze, gdybyśmy budowali jeden bardziej skomplikowany algorytm zamiast kilku mniejszych. Ciekawe byłoby także pisanie programów, których celem byłaby interakcja z innymi robotami. Podstawą jest jednak porzucenie środowiska NXT.
Spakowane pliki



