To jest stara wersja strony!
Laboratorium 3
Prezentacja robota:
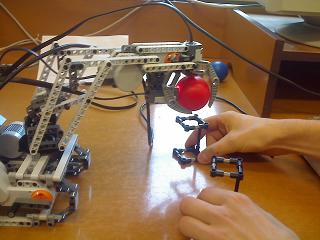
W tym tygodniu mięliśmy o wiele ułatwione zadanie. Nie musieliśmy sami budować robota, bo zrobili to koledzy z wcześniejszej grupy. Nam przypadło zadanie napisania algorytmów sterowania dla Gienia. Po wejściu do sali byliśmy pod wrażeniem tworów jakie zostawili nasi koledzy. Roboty wykonane zgodnie z instrukcjami producenta Lego robiły wrażenie swoim wyglądem. Trzeba przyznać że na samodzielne wymyślenie podobnych konstrukcji należało by poświęcić bardzo dużo czasu, a na to nie pozwalają jedynie półtoragodzinne zajęcia. Czas przy robotach płynie bardzo szybko - a strasznie dużo pomysłów przychodzi do głowy i niestety tylko nieliczne można przetestować. W tym tygodniu współpracowaliśmy razem z Gieniem, który przy pomocy kolegów zamienił się w dźwig. Bardzo ciekawie został wymyślony mechanizm poruszania ramieniem i zamykania chwytaka, co przez chwilę z zainteresowaniem analizowaliśmy. Dodatkowo Gieniu miał zamontowane dwa czujniki: czujnik światła i czujnik dotyku, które wykorzystalismy w naszych algorytmach.
Zdjęcia Gienia:


Projektowanie algorytmów:
Nasze algorytmy budowaliśmy w oparciu o gotowce z pomocy dostarczonej z oprogramowaniem. Dodaliśmy także kilka naszych modyfikacji, które sprawiły że w naszej opinii algorytmy działały bardziej naturalnie.
Algorytm I
Pierwszy algorytm został napisany w celu przetestowania ruchu ramienia w obydwu kierunkach. Robot wysuwa ramię, następnie przekręca je w jedną stronę, po chwili przekręca je z powrotem i składa je do pozycji wyjściowej. Schemat algorytmu został przedstawiony niżej:

alg-1.rbt
Algorytm II
Zadaniem algorytmu jest przeniesienie piłki z jednego stojaka na drugi z założeniem że znajdują się one w odpowiedniej empirycznie wybranej odległości, które są w zasięgu ramienia robota. Ten algorytm został napisany zgodnie z instrukcją zamieszczoną w dokumentacji. Robot wysuwa ramię i zaciska chwytak. Jeżeli nie ma przedmiotu przycisk czujnika nie zostanie wciśnięty i robot wraca do pozycji wyjściowej. Jeżeli natomiast znajdzie przedmiot, przekręca ramię w kierunku drugiego stojaka i odkłada piłkę na miejsce. Algorytm działał bardzo dobrze, jednak nie działał tak jak oczekiwaliśmy dlatego dokonaliśmy pewnych poprawek.
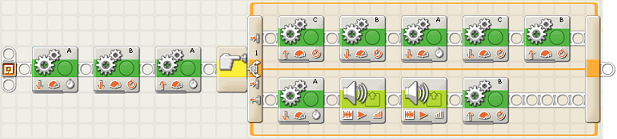
alg-2.rbt
Algorytm III
Zamieszczamy tutaj algorytm III, który jest poprawioną wersją algorytmu II. W poprzedniej wersji nie spodobało nam się to, że po zaciśnięciu chwytaka ramię pozostawało na tej samej wysokości i tylko przekręcało się w bok. Powodowało to że zaczepiało ono o stojak, na którym umieszczaliśmy piłki. Nasza modyfikacja objęła dźwignięcie ramienia do góry po złapaniu przedmiotu, przekręcenie i opuszczenie ramienia a następnie wypuszczenie przedmiotu.

alg-3.rbt
Algorytm IV
Algorytm ten, również został napisany zgodnie z instrukcją zamieszczoną w dokumentacji. Tym razem wykorzystujemy czujnik natężenia światła. Zadaniem robota jest rozróżnienie, którą piłkę złapał. Jeżeli jest to piłka niebieska ma zostać na stojaku. Przenosimy jedynie piłkę czerwoną. Algorytm działał zgodnie z tym co zostało zaprogramowane. Robot przenosi piłkę czerwoną, a zostawia niebieską.

alg-4.rbt
Algorytm V
Jest to podobna modyfikacja tym razem algorytmu IV. I tym razem ramię robota po zaciśnięciu się na piłce pozostawało na tej samej wysokości. Dodaliśmy podnoszenie i opuszczanie ramienia, przy przenoszeniu piłki.

alg-5.rbt
Integracja i testowanie:
Problemy:
Wnioski:
Propozycje rozszerzenia wiki:







