Sprawozdanie z laboratorium nr 1
Robot: Ewka
Data wykonania: 05.05.2010 godz. 17:00
Autorzy: Gabriela Pasek, Michał Paszko, Leszek Piątek
Początek pracy
Na początku przeglądnęliśmy stronę Laboratorium 1 w celu poznania tematyki oraz zadań do wykonania. Uruchomiliśmy brick-a i przechodziliśmy po menu sprawdzając dostępne opcje.
Następnie podłączyliśmy wszystkie sensory do bricka-a i sprawdzaliśmy ich działanie za pomocą programów testujących - wszystkie sensory działały prawidłowo.

Budowa robota
Po zapoznaniu się z tematyką laboratorium oraz brick'iem rozpoczęliśmy konstrukcję robota Ewka zgodnie z instrukcją zawartą w QuickStart.

Uruchomienie przykładowych programów
Po poprawnym skonstruowaniu robota uruchomiliśmy kilka programów, które były zapisane w pamięci brick-a w celu weryfikacji prawidłowego działania serwomechanizmów.
Stworzenie własnego projektu
Postanowiliśmy lekko zmodyfikować konstrukcję robota podłączając do niego wszystkie cztery sensory.

Działanie naszego programu „madafaka”:
wersja 1.0:
wersja 1.1:
chcieliśmy uwspółbieżnić reakcję na 2 bodźce - głosowy (reakcja jak w wersji 1.0) i dotykowy (sensor nacisku) - reakcja miała polegać na nagraniu aktualnego dźwięku z mikrofonu i odtworzeniu nagranej sekwencji, niestety nie wiedzieć dlaczego nie udało nam się zmusić robota do wykonywania obu czynności współbieżnie (tj. nie wiedzieliśmy jak zdefiniować fazę idle gdzie robot by czekał na któryś z bodźców zewnętrznych)
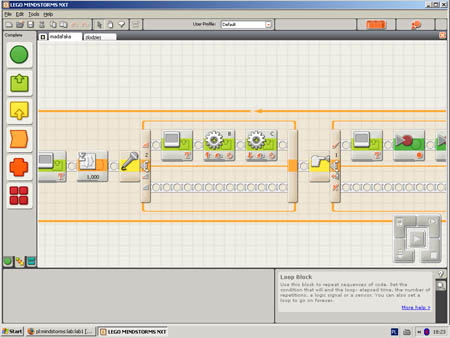
Niestety z powodu zakończenia czasu laboratorium nie udało nam się spakować projektu, dlatego poniżej zamieszczamy zrzut ekranowy.
Problemy
Podczas laboratorium nie stwierdziliśmy braku jakichkolwiek części robota ani usterek w jego działaniu.



