To jest stara wersja strony!
Zbudowaliśmy robota zgodnie z instrukcją , dodatkowo wyposażyliśmy go w czujniki : sonar , dźwiękowy
Robo-Gienek prezentował się jak na zdjęciu poniżej

sterowany był następującymi algorytmami:
Algorytm 1

Algorytm uruchamiał się po odczekaniu 3 sekund następnie poruszał
się robo-Gienek po lini prostej po napotkaniu przszkody wykrytej
przez czujnik(Sonar) robot obracał się o 90 stopni, a następnie ponownie poruszał się do przodu aż do napotkania przeszkody po raz kolejny..
Algortym 2
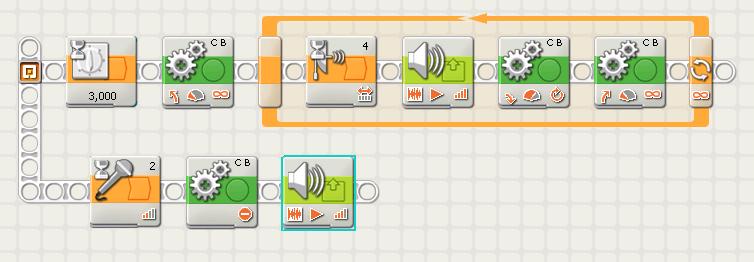
Algorytm ten był rozwiniętą wersją algorytmu nr 1 dodatkowo robot po wykryciu przeszkody wydawał komendę głosową , a jego ruch miał trajektorię koła . Dodatkowo po wykryciu dźwięku powyżej zadanej wartości robot zatrzymywał się i kończył się program wydając polecenie głosowe.


