To jest stara wersja strony!
Sprawozdanie z laboratorium Języki sztucznej inteligencji Ćwiczenie nr 2
10.12.2008 Środa 11:00
Maksymilian Piasecki, Jan Pollak, Mariusz Sokołowski
W trakcie zajęć zbudowaliśmy robota wg. własnego pomysłu. Robot był konstrukcyjnie zbliżony do przykładu z instrukcji Quickstart. Do wykrywania przeszkód użyliśmy czujnika odległości.
Algorytm sterujący robotem działał w następujący sposób: Robot posuwał się do przodu o określoną liczbę liczbę obrotów silnika sprawdzając czy nie ma przednim przeszkody, następnie zakręcał pod kątem prostym, w przypadku napotkania przeszkody robot cofał się a następnie obrał się i kontynuował jazdę w przeciwnym kierunku.
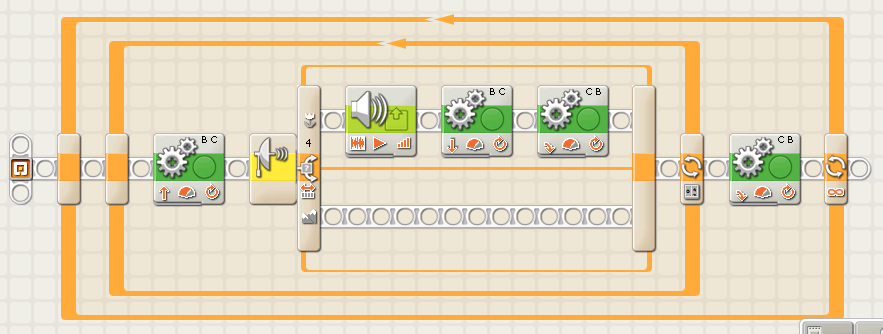
Podczas prób problemem okazał się czujnik odległości, który w przypadku zakrycia go zachowywał się tak, jak gdyby nic się przednim nie znajdowało. Rozwiązaniem okazało się zbudowania zderzaka przed robotem, dzięki czemu zawsze była zachowana odległość od przeszkody.
