To jest stara wersja strony!
Sprawozdanie z laboratorium Języki sztucznej inteligencji Ćwiczenie nr 2
10.12.2008 Środa 11:00
Maksymilian Piasecki, Jan Pollak, Mariusz Sokołowski
W trakcie zajęć zbudowaliśmy robota wg. własnego pomysłu. Robot był konstrukcyjnie zbliżony do przykładu z instrukcji Quickstart. Do wykrywania przeszkód użyliśmy czujnika odległości.
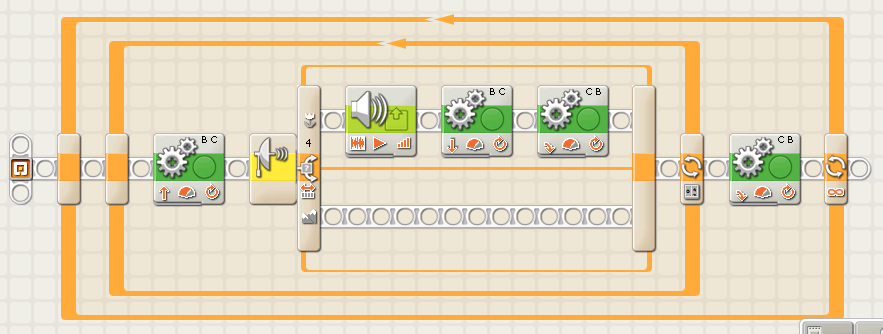
Algorytm sterujący robotem działał w następujący sposób: Robot posuwał się do przodu o określoną liczbę liczbę obrotów silnika sprawdzając czy nie ma przed nim przeszkody, następnie zakręcał pod kątem prostym, w przypadku napotkania jej robot cofał się a następnie obracał się i kontynuował jazdę w przeciwnym kierunku.
Podczas prób problemem okazał się czujnik odległości, który w przypadku zakrycia go zachowywał się tak, jak gdyby nic się przednim nie znajdowało. Rozwiązaniem okazało się zbudowania zderzaka przed robotem, dzięki czemu zawsze była zachowana odległość od przeszkody.
Na stronie laboratorium użyteczne byłoby więcej informacji na temat komunikacji z robotem przez Bluetooth.
-
