To jest stara wersja strony!
Laboratorium 3
Prezentacja robota:
W tym tygodniu mięliśmy o wiele ułatwione zadanie. Nie musieliśmy sami budować robota, bo zrobili to koledzy z wcześniejszej grupy. Nam przypadło zadanie napisania algorytmów sterowania dla Gienia. Po wejściu do sali byliśmy pod wrażeniem tworów jakie zostawili nasi koledzy. Roboty wykonane zgodnie z instrukcjami producenta Lego robiły wrażenie swoim wyglądem. Trzeba przyznać że na samodzielne wymyślenie podobnych konstrukcji należało by poświęcić bardzo dużo czasu, a na to nie pozwalają jedynie półtoragodzinne zajęcia. Czas przy robotach płynie bardzo szybko - a strasznie dużo pomysłów przychodzi do głowy i niestety tylko nieliczne można przetestować. W tym tygodniu współpracowaliśmy razem z Gieniem, który przy pomocy kolegów zamienił się w dźwig. Bardzo ciekawie został wymyślony mechanizm poruszania ramieniem i zamykania chwytaka, co przez chwilę z zainteresowaniem analizowaliśmy. Dodatkowo Gieniu miał zamontowane dwa czujniki: czujnik światła i czujnik dotyku, które wykorzystalismy w naszych algorytmach.
Zdjęcia Gienia


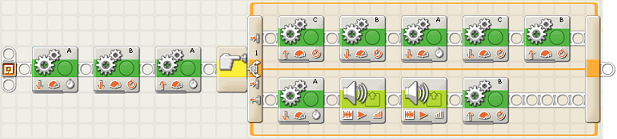
Projektowanie algorytmów:
Nasze algorytmy budowaliśmy w oparciu o gotowce z pomocy dostarczonej z oprogramowaniem. Dodaliśmy także kilka naszych modyfikacji, które sprawiły że w naszej opinii algorytmy działały bardziej naturalnie.
Algorytm I

Algorytm II
Algorytm III

Algorytm IV

Algorytm V

Integracja i testowanie:
Problemy:
Wnioski:
Propozycje rozszerzenia wiki:







