Konstrukcja robota Robo Arm T-56:
Na laboratorium zdecydowaną większość czasu poświęciliśmy na zbudowanie ramienia robota wraz z chwytakiem. Instrukcja znajdowała się w programie Mindstorms NXT (W instrukcjach w dziale: Mechanics → Robo Arm T-56) i całość zajmowała 82 strony.
Bezpośredni link do instrukcji: Robo Arm T-56
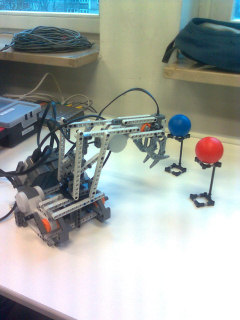
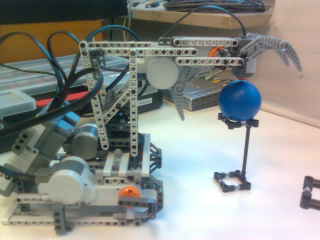
Zdjęcia robota:
Algorytmy:
Niestety, po zbudowaniu dość skomplikowanego robota zostało nam tylko kilka minut na zaprogramowanie go.
1) Zdążyliśmy sprawdzić, że silniki pracują prawidłowo, możliwość wykonywania trzech rodzaju ruchów: ramię w lewo/prawo, ramię góra/dół, operowanie chwytakiem: złap/puść.
2) Prosty algorytm: opuszczaj ramię w dół dopóki nie będzięsz mógł złapać piłeczki (warunek: wciśnięcie przycisku), chwyć piłeczkę, następnie podnieś ramię do góry i upuść piłeczkę z wysokości na zbudowaną platformę.
Problemy:
- Zgodnie z instrukcją do laboratorium 3, powinniśmy zastać już zbudowanego robota, który mógł przenosić kulki. W związku z brakiem jakiegokolwiek robota zbudowaliśmy robota z Help'a w programie MindStorms NXT, który mógł wykonywać podobne funkcje, a który mogłaby oprogramować grupa następna.
- Pomysł podany w instrukcji NXT na stosowanie czujnika przycisku jako warunku na chwycenie piłki jest chybiony - gdy ramię opadało w dół na piłeczkę i natrafiało na przycisk, piłeczka zamiast wciskać przycisk na ramieniu wyślizgywała się z platformy. Możnaby skorzystać z czujnika odległości lub światła, z braku czasu nie zdążyliśmy sprawdzić innych czujników.
Propozycje zmian:
- Proponujemy wydrukować kilka instrukcji składania robotów (z Help'a programu lub z podanych niżej linków) - wtedy 2 osoby mogą składać robota z instrukcji na papierze, a trzecia osoba może tworzyć zarys algorytmów w NXT (bo instrukcja nie musi być już wyświetlana na monitorze jak w naszym przypadku).
- Budowanie skomplikowanych robotów zajmuje zbyt dużo czasu, dlatego też wydaje się, że lepszym pomysłem byłoby poświęcenie pierwszych zajęć na zbudowanie robotów np. ze strony http://www.active-robots.com/products/mindstorms4schools/building-instructions.shtml czy http://ricquin.net/lego/instructions/, które do końca semestru nie byłyby rozkładane. W podanych linkach znajduje się 8 instrukcji różnego rodzaju robotów, które można zaprogramować w NXT (w laboratorium jest dostępnych 12 zestawów, więc 4 mogłyby być rezerwowe). Dzięki temu, zajęcia polegałyby na samodzielnym rozmieszczeniu czujników i oprogramowaniu robota, a nie na układaniu klocków.
- Na stronie realizacje są podane tylko linki do instrukcji budowy dwóch robotów (Classic Clock i Sound Bot). Proszę w miarę możliwości dopisać linki do instrukcji: http://www.active-robots.com/products/mindstorms4schools/building-instructions.shtml, http://ricquin.net/lego/instructions/.
Plik z laboratorium:
roboarm.zip

