Laboratorium nr 5
Skład zespołu:
Zespół wyjątkowo miał skład inny niż zwykle: Paweł Grzesiak, Łukasz Habrzyk, Marcin Godlewski.
Zadanie do wykonania:
Zadanie polegało na przetestowaniu działania API PLNXT.
Programowaliśmy robota przy użyciu podstawowych konstrukcji języka Prolog.
Konstrukcja robota:
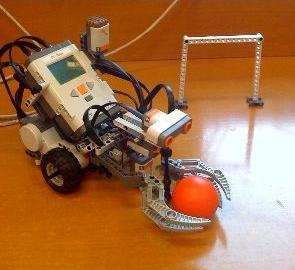
Tym razem w laboratorium czekał już na nas gotowy do użycia zbudowany robot.
Jego zdjęcia są widoczne poniżej:

Realizacja:
Skupiliśmy się na testowaniu klauzuli nxt_rotate, gdyż mieliśmy znaczne kłopoty z zapanowaniem nad nią.
Użycie konstrukcji nxt_rotate(700, 90). powinno skłonić robota do obrotu o 90 stopni. Precyzja jego działań
była jednak nie najlepsza. Na filmie:
obrot.zip
zarejestrowaliśmy wielokrotne wykonywanie obrotów o ten sam kąt. Można zauważyć, że precyzja ruchów jest zmienna.
Niestety nie zdążyliśmy zarejestrować obrotów robota w lewo. Zachowywał się on wtedy jeszcze bardziej nieregularnie
i nie byliśmy w stanie nad nim zapanować. Nie wiemy czy było to wynikiem naszych błędów, błędów w NXTPL czy też
jeszcze innych czynników. Na filmie:
gol.zip
widać robota strzelającego gola :)
Powyższe filmy są w formacie 3gp. Jeśli ktoś nie dysponuje odpowiednim oprogramowaniem do jego odtworzenia może dokonać
konwersji na przykład do plików avi przy pomocy dostępnych w Internecie bezpłatnych narzędzi.
Uwagi:
Sądzimy, że przydatna mogłaby być klauzula powodująca permanentne obracanie sie robota wokół własnej osi.
Mogłaby być podobna do nxt_rotate, ale bez argumentu będącego kątem obrotu. Robot w ramach jej wykonywania
obracałby się aż do wywołania nxt_stop. - tak jak w przypadku odpowiednio wywołanego nxt_go.

