Laboratorium nr 2
Konstrukcja robota:
Pierwszym punktem laboratorium było skonstruowanie robota. Podczas realizacji tego punktu oparliśmy się na dołączonej do zestawu instrukcji. Wykroczeniem poza jej ramy było podłączenie do robota sensorów i zamocowanie ich na jego elementach.
Zdjęcia robota:


Algorytmy:
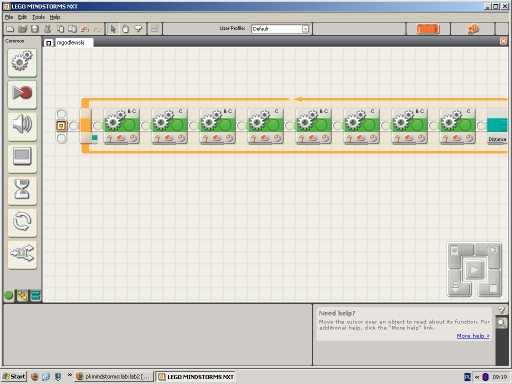
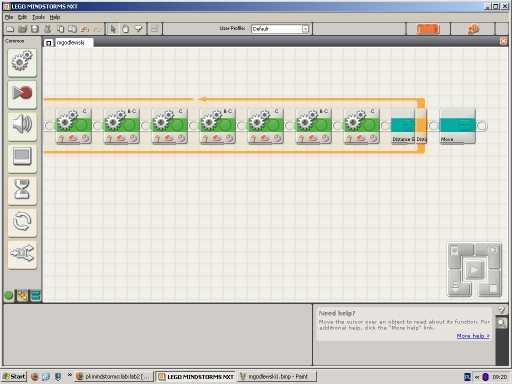
Kolejnym punktem zajęć było zaimplementowanie w środowisku programistycznym LEGO :) algorytmu, który miał być wykonywany przez robota. Stworzyliśmy 2 algorytmy. Wykonanie pierwszego miało polegać na pokonywaniu przez robota trajektorii o kształcie kwadratu. Drugi miał w założeniu być rozszerzeniem pierwszego o możliwość zatrzymania robota przez sygnał z któregoś z sensorów.
Zrzuty ekranu z algorytmem zapisanym w środowisku LEGO:
Problemy:
W przeciwieństwie do pierwszego algorytmu (który był wykonywany poprawnie) drugi algorytm nie działał zadowalająco. Było to prawdopodobnie spowodowane niewłaściwym dobraniem progów czułości sensorów, których przekroczenie miało spowodować zatrzymanie robota.
Załączone pliki:
Plik z programem:
progr.zip



