Sprawozdanie z laboratorium 1
1. Cel zajęć
Celem pierwszego ćwiczenia laboratoryjnego było zapoznać się z elementami sprzętowymi zestawu NXT, w skład którego wchodziły: NXTbrick, 3 silniki, 4 sensory, kable łączące, kabel USB oraz klocki LEGO służące do konstrukcji robota. Następnie przy pomocy środowiska LEGO Mindstorms poznaliśmy podstawą formę programowania i komunikacji tego zestawu.

2. Zapoznanie z zestawem
Pierwszą czynnością wykonaną po zaznajomieniu się z instrukcją było sprawdzenie czy wszystkie podzespoły i części zestawy znajdują się w obrębie stanowiska. Potwierdziwszy obecność wszystkich elementów dokonaliśmy testu działania zestawu wykorzystując polecenie „Try me”, następnie sprawdziliśmy sposób działania sensorów wybierając opcję „View”, która pokazała nam ich wskazania. W wyniku tego działania stwierdziliśmy , iż sposób działania czujnika odległości posiada pewną niedogodną właściwość. W przypadku zasłonięcia czujnika, wartość pokazywana wynosiła 255, co oznacza, że nie ma w zasięgu żadnego przedmiotu.
Po stwierdzeniu sprawności zestawu robot „Henio” został podłączony do komputera przez port USB. Uzyskanie komunikacji pozwoliło na przejść do następnego etapu, czyli napisania pierwszego programu.

3. Programy
Podczas procesu zaznajomienia się z zestawem „Henio” skonstruowaliśmy kilka programów wykorzystując dostarczone środowisko Lego Mindstorm, które dołączamy do sprawozdania. Jakkolwiek nie znaleźliśmy darmowej aplikacji pozwalającej uzyskać podgląd programów w wyniku czego nie jesteśmy w stanie zilustrować algorytmów działania robota.
Na laboratorium dokonaliśmy implementacji prostych algorytmów zachowań, takich jak:
- program0.rbt
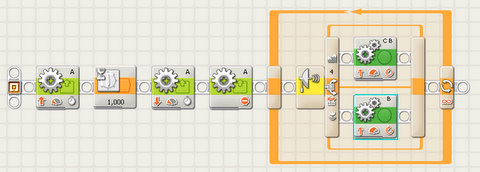
Robot wykonuje klaśnięcie szczękami, po czym zaczyna się poruszać do przodu. W przypadku napotkania przeszkody dokonuje obrotu o 90 stopni.
- program1.rbt

Prosty program, robot odgrywa dźwięk, następnie dokonuje przemieszczenia się.
- program2.rbt
Robot, w zależności od wskazania sensora odległości, dokonuje obrotu, bądź pozostaje w bezruchu.
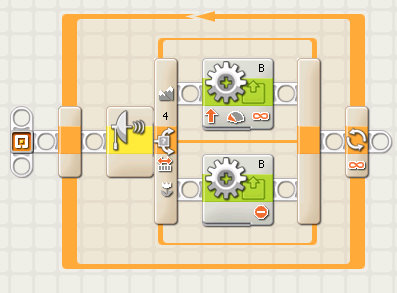
- program4.rbt

Robot dokonuje otwarcia, a następnie zamknięcia szczypiec, i w założeniu teoretycznym uchwycenie przedmiotu. Następnie porusza się z tym przedmiotem tak jak w przypadku program0. Przykład ten pokazuje złą interpretacje zasad działania edytora. Robot sprawdza stan czujnika, jednak z powodu tego , że instrukcje są wykonywane sekwencyjnie, nie interpretuje jego odczytu, wykonując dalsze komendy. Tak więc, praktycznie, program działa podobnie do program0.
Tworzenie tych programów pozwoliło nam zauważyć, że bloki wykonywane są sekwencyjnie. W celu uzyskania logiki działania (np. zachowania w zależności od wskazania sensora) należy zastosować bardziej złożone bloki jak np. blok switch.
4. Wnioski
Robot „Henio” wywarł na nas pozytywne wrażenie, szczególnie bogaty zestaw czujników, który dał nam możliwość tworzenia ciekawych aplikacji. Jednak środowisko pracy dostarczone przez producenta nie wywołało naszego entuzjazmu. Aplikacja jest prosta, jednak nie możemy stwierdzić, że jest intuicyjna. Obsługa tego środowiska powodowała w nas uczucie ograniczonych możliwości.
Pomimo tych niedogodności zestaw NXT jest bardzo ciekawym i interesującym przykładem.
5. Uwagi
Pomimo usilnych prób nie udało nam się rozwiązać problemu komunikacji za pomocą bluetooth'a. Nasz komputer nie potrafił obsłużyć bluetooth'a. Prawie dokonaliśmy połączenia z komputerem sąsiedniej grupy, jednakże napotkaliśmy na sytuację w której wymuszono na nas podanie hasła administratora, którego nie posiadaliśmy.
Dodatkowym utrudnieniem jest mały rozmiar sali laboratoryjnej, w przypadku kompletu grup sala jest za ciasna.
Laboratorium zostało wykonane w trzyosobowej grupie : Reichert, Polak, Papp.





