Laboratorium 3 - Sprawozdanie
1.Przygotowania
Do wykonania laboratorium użyliśmy gotowego robota, piłeczkę i podstawkę na nią.
2.Algorytm "Magazynier"
W czasie zajęć zajęliśmy się programem opartym na pętlach. Zajął on dłużej niż się spodziewaliśmy. Pojawiły się problemy z ustawieniem kąta rozwarcia szczęk. Przy niskich wartościach kątów Leon nie łapał piłki a przy wysokich zawieszał program, bo nie mógł dokończyć ruchu. Właśnie wstępna faza koordynacji szczęk zajęła najwięcej czasu. Odwrócenie się i jazda do czasu napotkania przeszkody pojawiły się już w naszych programach, dlatego nie sprawiły większych problemów.
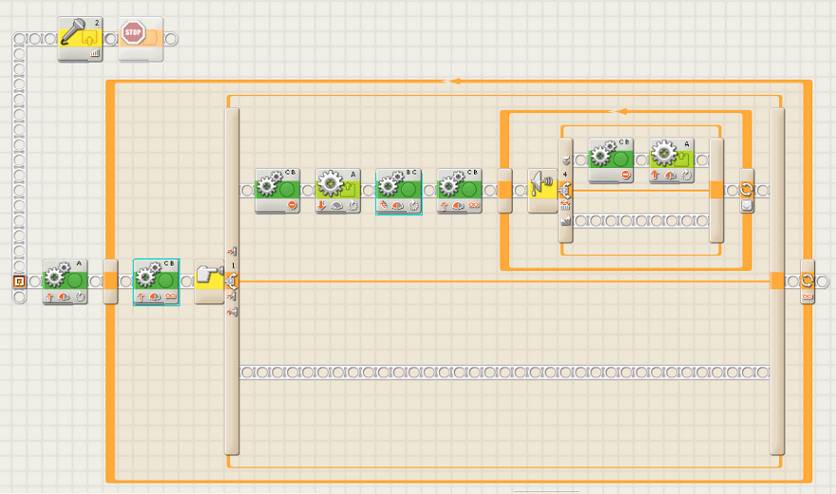
Wykonując ostateczną wersję programu Leon jechał, trafiał na piłkę (leżącą na podstawce) i podnosił ją powoli. Następnie odwracał się i jechał dopóki nie natknął się na przeszkodę. W niewielkiej odległości od niej upuszczał piłkę.
Postanowiliśmy napisać ten algorytm w zmienionej formie, korzystając min. z bloczków czekania na dotyk. Program był gotowy, jednak nie zrobiliśmy mu printscreena. Został jednak załączony w zipie na końcu strony.
3.Obserwacje i wnioski
Na laboratorium za bardzo skupiliśmy się na dopracowywaniu drobnych problemów, dlatego zdążyliśmy wykonać tylko pierwsze zadanie z czterech.
Zauważyliśmy, że robot jest wyczulony na wartości kątów i dążyliśmy do ustalenia wartości, przy której Leon zawsze łapałby piłkę i pracował dalej.
Plik z programami: leon_lab3.zip
