Laboratorium 1 - Sprawozdanie
1.Wstęp
Celem laboratorium było zapoznanie się z zestawem Lego Mindstorms oraz ze sposobem jego programowania.
2.Przygotowania
Nam trafił się robot o nazwie Czesław. Był to już w pełni zbudowany klasyczny robot możliwy do wykonania z tego zestawu klocków.

Po krótkich oględzinach konstrukcji robota przystąpiliśmy do wykonywania zadań wg. podanej instrukcji.
Sprawdziliśmy działanie silników i czujników przy pomocy funkcji wbudowanych w „sercu” robota. Czujnik odległości działał lepiej lub gorzej w zależności od czego mierzył odległość - najlepszą przeszkodą była płaska kartka.
3. Programowanie robota przy użyciu NXT Program
Stworzyliśmy kilka trywialnych programów przy użyciu wbudowanych funkcji jednak ich możliwości były na tyle ograniczone że szybko przeszliśmy do użycia programu na PC pozwalającego na swobodne, wygodne i przejrzyste zaprogramowanie robota.
4. Programowanie robota przy pomocy oprogramowania Lego Mindstorms
Tworzenie programu polegało na łączeniu różnych bloczków i ustawianiu ich parametrów. Pozwalało to na sterowanie silnikami, odbieranie informacji z czujników oraz tworzenie różnego rodzaju pętli czy instrukcji warunkowych.
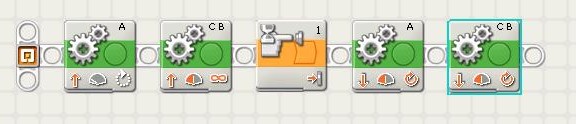
Sprawdzając działanie kolejnych bloczków poprzes testowanie ich działania na robocie udało nam się utworzyć bardzo prosty ale prawidłowo działający program ktory:
otwierał szczęki robota o 30 stopni, jechał w przód aż do napotkania przeszkody, wtedy zatrzymywał się, zamykał szczęki i zaczynał cofać o 2 obroty w tył.
Za ciekawe spostrzeżenie uznaliśmy to, że prędkość obrotu silnika jest wprost proporcjonalna (a nie jak oczekiwaliśmy: odwrotnie proporcjonalna) do jego mocy.
Zadowoleni z sukcesu stworzyliśmy program, który miał:
sprawdzić odległość od przeszkody i gdy była ona większa od 30cm ruszyć do przodu, a gdy była mniejsza to ruszyć do tyłu i tak w nieskończonej pętli.
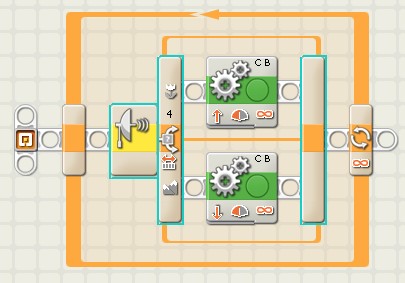 Liczyliśmy na to, że robot zacznie oscylować wokół punktu odległego o 30cm od przeszkody. Jakież było nasze zdziwienie gdy po załadowaniu programu robot zaledwie drgnął. Co gorsza odmówił on nam posłuszeństwa już do końca zajęć. Nawet próby wgrania naszego pierwszego programu, który wcześniej działał bez zarzutu, nie dały żadnego rezultatu.
Liczyliśmy na to, że robot zacznie oscylować wokół punktu odległego o 30cm od przeszkody. Jakież było nasze zdziwienie gdy po załadowaniu programu robot zaledwie drgnął. Co gorsza odmówił on nam posłuszeństwa już do końca zajęć. Nawet próby wgrania naszego pierwszego programu, który wcześniej działał bez zarzutu, nie dały żadnego rezultatu.
5. Wnioski i spostrzeżenia
Laboratoria z robotami Lego NXT uznajemy za świetny pomysł!
Mamy świadomość, że używane w tym zestawie podzespoły są wysoce nieprecyzyjne, a możliwości programowania mocno ograniczone (przynajmniej w programie Lego Mindstorms) ale to wymusza na nas przewidzenie i obsłużenie wszelkich niekorzystnych zdarzeń przy pomocy najprostszych narzędzi tak aby robot ostatecznie wykonał zadanie. W poprzednim podpunkcie opisaliśmy dokładnie przyczyną czego nasz robot przestał funkcjonować. Niestety nie zdążyliśmy na laboratorium wyjaśnić tej sytuacji.


