Sprawozdanie z laboratorium 2
1. Wstęp
Celem laboratorium było doskonalenie technik programowania robotów przy użyciu technologii LEGO Mindstorms. Podczas zajęć tworzone były bardziej zaawansowane algorytmy postępowania robota mające na celu na przykład rozpoznawanie i omijanie przeszkód lub podążanie za głosem.
2. Modyfikacja robota
Podczas laboratorium Henio przeszedł niewielką modyfikację dzięki której przekształcony został w wózek kamerowy. Modyfikacja ta miała na celu umieszczenie w nim telefonu z włączoną opcją kamery. Zmiany były na tyle niewielkie aby przed zakończeniem laboratorium można było łatwo doprowadzić Henia do stanu w jakim znajdował się przed rozpoczęciem pracy. Konstrukcję przedstawia poniższe zdjęcie.

3. Programowanie robota
Celem tego programu było takie zaprogramowanie robota aby jego trajektoriom był kwadrat oraz aby w przypadku napotkania przeszkody wycofał się i wydał sygnał dźwiękowy. Schemat tego algorytmu znajduje się na poniższym zrzucie ekranu:
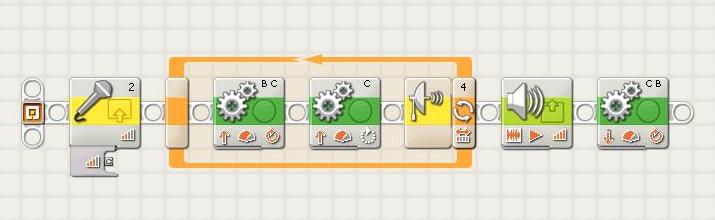
A tutaj znajduje się film prezentujący zachowanie robota po uruchomieniu powyższego algorytmu:
Program ten miał na celu stworzenie algorytmu omijania przeszkód. Podczas tego programu pierwszy raz użyta została zamocowana na robocie kamera. Oto wynik jej pracy:
http://www.youtube.com/watch?v=M8v8lWEA78g
Schemat tego algorytmu przedstawiony jest na poniższym obrazku:

Poniższy film pokazuje pracę robota „od góry”:
Ostatnim zadaniem zrealizowanym w trakcie laboratorium było takie zaprogramowanie Henia aby podążał za głosem. Wynik jego pracy przedstawia poniższy film:
http://www.youtube.com/watch?v=O6Eq2fRNP7E
Schemat tego algorytmu znajduje się na poniższym rysunku:

Podczas realizacji tego zadania pojawił się problem ponieważ Henio miał problemy z rozróżnieniem dźwięku od echa które powstawało w uczelnianych korytarzach. Poniżej znajduje się film na którym widać jak robot nie może się zdecydować czy udać się do wołającej go osoby czy w kierunku ściany od której odbija się dźwięk.
http://www.youtube.com/watch?v=inpaG6eVYls
4. Sugestie i przemyślenia
Przy pracy z Lego Midstorm czas płynie bardzo. Półtoragodzinny czas zajęć ogranicza realizację pomysłów. Między innymi podczas programowania robota tak, aby podążał za dźwiękiem pojawił się pomysł, że jeden robot mógłby emitować dźwięk, a drugi za nim podążać. Praca na zajęciach, dzięki sporej dowolności w wykonaniu ćwiczenia jest ciekawa i efektywna, jedynym mankamentem jest ograniczony czas.
5. Podsumowanie
Środowisko LEGO Mindstorm umożliwia bardzo przyjemną zabawę z programowaniem robotów. Nie nadaję się jednak do powierzenia mu odpowiedzialnych zadań ze względu na małą dokładność elementów pomiarowych oraz mało precyzyjne sterowanie. Przykładowo gdy ustawiono aby robot obrócił się o 90° gołym okiem można było zaobserwować iż czasami obracał się o kąt ostry a czasami o rozwarty.
6. Spakowane programy



