Sprawozdanie - laboratorium 2
Wstęp
Naszym zadaniem na drugim laboratorium była dalsza praca z robotem LEGO Mindstorm i dostarczonym środowiskiem programowania. Ponieważ robot był już złożony, od razu przystąpiliśmy do programowania.
Programy
Patrol
Celem tego algorytmu było kilkukrotne pokonanie zadanej trajektorii przez robota (u nas była to jazda po kwadracie), przy czym po napotkaniu przeszkody robot miał się cofnąć się, wydać dźwięk i zakończyć swój patrol.

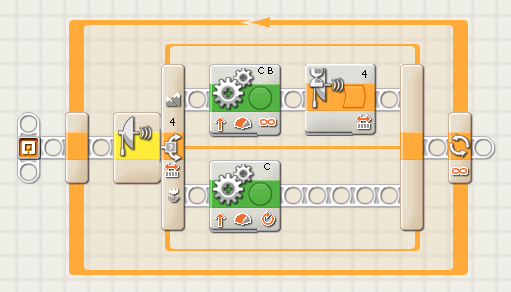
Chcieliśmy, aby robot reagował również na skutek aktywowania czujnika dotyku (np. dla niskiej przeszkody). W tym celu zmodyfikowaliśmy algorytm następująco:

Unik
Celem tego algorytmu było unikanie przeszkód. Robot miał jechać na wprost aż do napotkania czegoś na swojej drodze, a następnie skręcić i jechać dalej.
Podsumowanie
Laboratorium sprawiło nam sporo problemów - pomimo tego, że zadane algorytmy były bardzo proste, nie byliśmy w stanie szybko wykonać ich w środowisku dostarczonym przez LEGO, zapewne przez nasze dotychczasowe doświadczenia z językami programowania i związanym z nimi sposobem rozumowania. Według nas bardziej celowe byłoby programowanie w jakimś języku, np. Python.
Spakowane pliki


