Sprawozdanie z laboratorium 2
1. Wstęp
Celem drugich zajęć laboratoryjnych było zrealizowanie 1-2 prostych algorytmów sterowania opisanych na stronie dotyczącej drugiego ćwiczenia. Do realizacji wybraliśmy algorytmy „Patrol” oraz „Uniki”, dodatkowo ponowiliśmy próby komunikacji za pomocą bluetooth'a.
2. Algorytmy
Patrol
Algorytm „Patrol” zakłada następujące zachowanie robota :
- robot jeździ po zadanej trajektorii - koło,
- powtarza przejazd N razy - przejazd ciągły,
- robot zatrzymuje się po napotkaniu przeszkody - zbliżenie,
- odtwarzany jest sygnał dźwiękowy w momencie napotkania przeszkody,
- robot cofa po napotkaniu przeszkody,
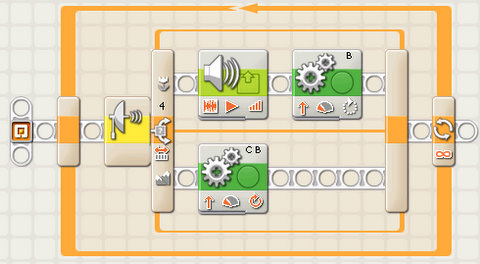
Dokonując realizacji algorytmu zdecydowaliśmy napisać program spełniający całą zadaną funkcjonalność z zachowaniem prosty programu. W wyniku tych działań stworzyliśmy następujący program : henio_patrol_pr_2.rar

W pętli zawarto blok odpowiedzialny za ruch robota, w przypadku wykrycia przedmiotu w bliskiej odległości następuje uruchomienie sygnału dźwiękowego oraz wycofanie pojazdu. Obłożenie całego algorytmu pętlą spowodowałoby otrzymanie programu , który po napotkaniu przeszkody ponownie wykonywałby zadany patrol, jednakże treść wymagań nie wspominała o ciągłości działania.
Uniki
Algorytm „Uniki” zakłada następujące zachowanie robota :
- robot jedzie prosto,
- po zbliżeniu do przeszkody wykonuje unik, obrót w prawo,
- przy uniku odtwarzany jest dźwięk,
Bogatsi o doświadczenia wyniesione z realizacji pierwszego algorytmu, zdecydowaliśmy powtórzyć tok naszego rozumowania. Stworzyliśmy program, który cechuje się zarówno prostotą, oryginalnością jak i skutecznością działania : henio_uniki_pr_2.rar
Przedstawiony powyżej program w zależności od wskazań czujnika dokonuje ruchu robota do przodu, bądź też obrót o 90 stopni w prawo i odtworzenie dźwięku. Całość jest zawarta w pętli, dlatego też robot działa do momentu utraty zasilania, bądź ręcznego zatrzymania.
Komunikacja
Na laboratoriach ponownie podjęliśmy próbę nawiązania komunikacji z sprzętem komputerowym za pomocą technologii bluetooth. Niestety nie udało nam się sparować urządzeń. Głównymi problemami były :
- urządzenie usb umożliwiające komunikację nie działało w sposób prawidłowy ( nie wykryte przez system operacyjny, bądź wymagane wprowadzenie hasła administratora ),
- komunikacja z sąsiednim komputerem uniemożliwiona z powodu braku znajomości hasła administratora, komputer rozpoznał urządzenie, tak samo jak Henio rozpoznał komputer, jednakże nie mógł przeprowadzić poprawnej komunikacji,
3. Wnioski
Doświadczenia wyniesione z pierwszych laboratoriów pozwoliły na sprawniejsze implementowanie algorytmów. Na pierwszych zajęciach zabrakło dokumentu prezentującego przykładowe konstrukcje w dostarczonym środowisku, czy też dokumentu typu „HowTo”.
Dużym utrudnieniem w naszych próbach realizacji algorytmu „Śledzenie” , który polegał na śledzeniu sygnału dźwiękowego i poruszaniu się w jego kierunku, był brak stałego źródła dźwięku.
4. Uwagi

