
Do testów początkowych użyliśmy robota zbudowanego j.w.
Robot ten wykorzystywał wszystkie sensory.
Pierwszym naszym sukcesem było zwrócenie wartości naładowania baterii :)
Następnie przeprowadziliśmy serie testów jak w laboratorium zapoznanie z PLNXT:
nxt_touch(Value)
zwrócił 0 dla nie braku kontaktu, 1 dla kontaktu
nxt_sound(Value)
dla otoczenia wartość były 2,6
dla mówiącej Pauliny 12
dla bliskiego klaskania 47,72
nxt_light(Value)
dla światła w pracowni wynik wynosił 56
dla przysłoniętego ręką czujnika 7,23
dla światła z latarki 95,100
oczywiście udało nam się także poruszyć robota, zaśpiewał dla nas oraz mrugał led'em:)
Po tym wstępie przeszliśmy do programu z przykładu, który zakończył się z powodzeniem.
Naszym dalszym krokiem była przebudowa robota na potrzeby poruszania się po okręgu.
Na planszy prezentował się następująco:
Niestety, wyniki otrzymywane przez sensor umieszczony z przodu pojazdu nieznacznie się różniły!
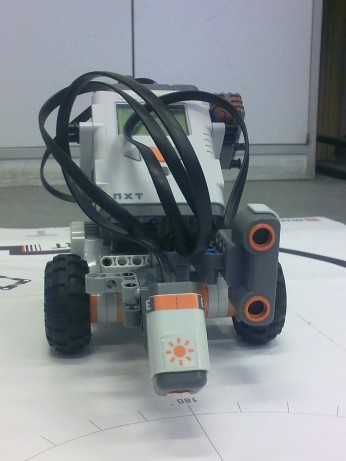
Postanowiliśmy przebudować naszego robota, umieszczając czujnik bardzo blisko planszy testowej pod kątem 90stopni.
Tak prezentuje się Kajtek gotowy do podróżowania po planszy:

Dla przerobionego programu:
i umieszczeniu Kajtka na początku planszy,otrzymaliśmy następujące wyniki:
32,32,32,32,32,31,32,33,34,33,34,34,36,36,36,37,35,35,35,35,37,36,37,36,37,37,37,37,35,(…),31,31,26,23
Niestety, na więcej nie starczyło czasu :(


